
「4足歩行」2回目~とその思い出~
今回のテーマは「4足歩行」。
2回目です。
よく本屋に行くと「4足歩行2回目」と書いた本がありますね。(?)
その中にあったのが次の工作。(この書き方はもう飽きてきた。)
1回目やったけれどもう一度しよう。
そしてそれが2回目となる。
あたりまえではある。
2回目はたいてい必ず一回目よりもうまくなっているものである。
が、今回は前の方が格好よいといえる。
そう言う意味では失敗、しかし今回のほうが明らかに一回目に比べて2回目のほうが前進するスピードが速い。
今回、格好なんてどうでもよかったから一回目に比べてうまくいった。
3回目をするとどうなるだろう。
俺の中ではもう行き詰まっている感があるので他の人に意見を聞いてみるか。
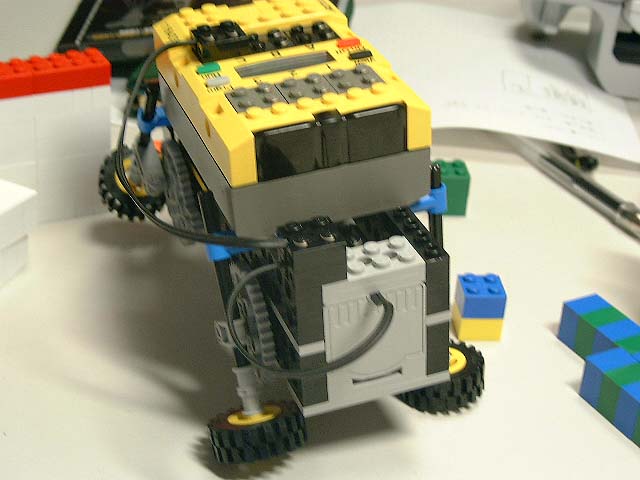
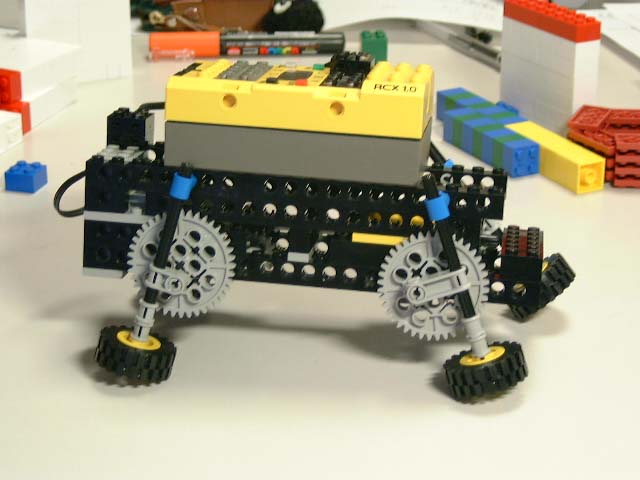
わかるでしょうか。
なかなか格好悪いです。
モーターは前回と同じ一つだけ。
制作時刻は覚えてません。
土曜日の午前中に作ったと思う。
眠気を我慢して作ったので作った後はすぐ寝た。
というか落ちてた。
起きたらいい感じに昼になっててみんなが作業をしていた。
レゴプロックの細部についての解説はあんまり無いですがまあ取りあえず解説しましょう。
今回、RCXは当然モーターの電源としてだけ使われています。
今回、何が変わったのかというと先ず一つは足の動き方。
前よりもストロークが長くなっています(見た目は短そうですけど)。
実際には、前回の構造を上下逆にした形となっています。
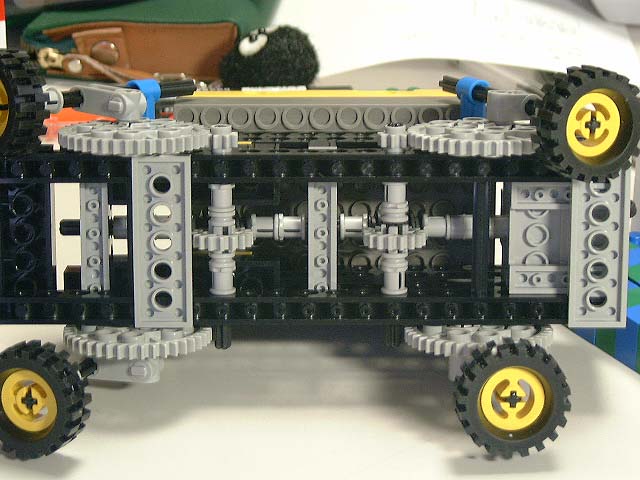
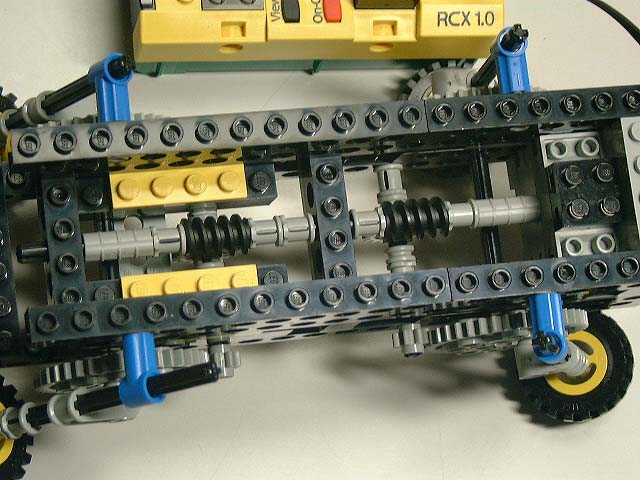
次に変わったのはギヤの数。
前回は結構無駄なギヤを使っていた事に気がつき、今回は必要最低限を目指しました。
無駄に多くギヤをつけると様がよくなるのですが、そんな事は今回は気にしてません。
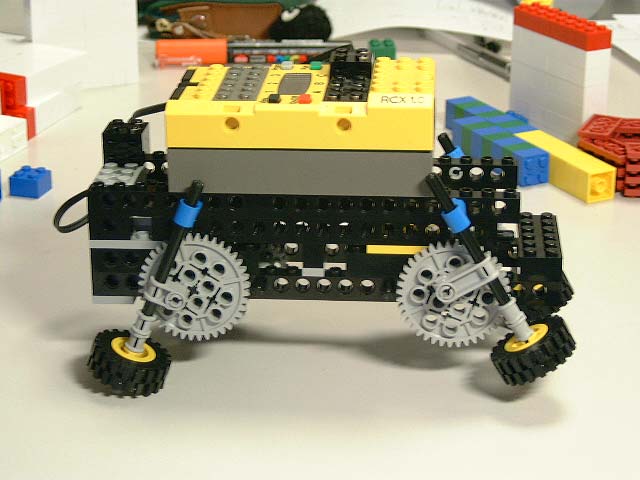
重心も下がったかな。
最後に歩いているさまを4枚つづりで。
ニョーっと足が出ているのがわかるでしょうか。


次週のRCXはどうしましょう。(そればっか。)
前にモーターが壊れたの代わりをONLINEで注文していたのがどといたので、それを紹介しましょうか。いろんなセンサーも頼んでいます。
(c)1999,
Masakazu Shin-ya<shintani@caramelpot.co.jp>
20/Nov/1999